#interaction #installation
_

Chirp is a set of 6 robotic birds reacting to their environment and to each other. It is a prototype investigating emergent behaviours in swarm robotics .
_
Context _ 1 week workshop @ the Interactive Architecture Lab (Bartlett, UCL). Collaborators: Christine Wurth, Minerva Zhang and Alfredo J. López Nieves. Completion: 2017.
Role _ Interaction designer, researcher.
Tools _ Rhino3D, Arduino.
Why? Swarm robotics is an approach to the coordination of multiple robots as a system which consist of large numbers of mostly simple physical robots. It is supposed that a desired collective behaviour emerges from the interactions between the robots and interactions of robots with the environment. The goals of swarm robotics include keeping the cost of individual robots low to allow scalability.
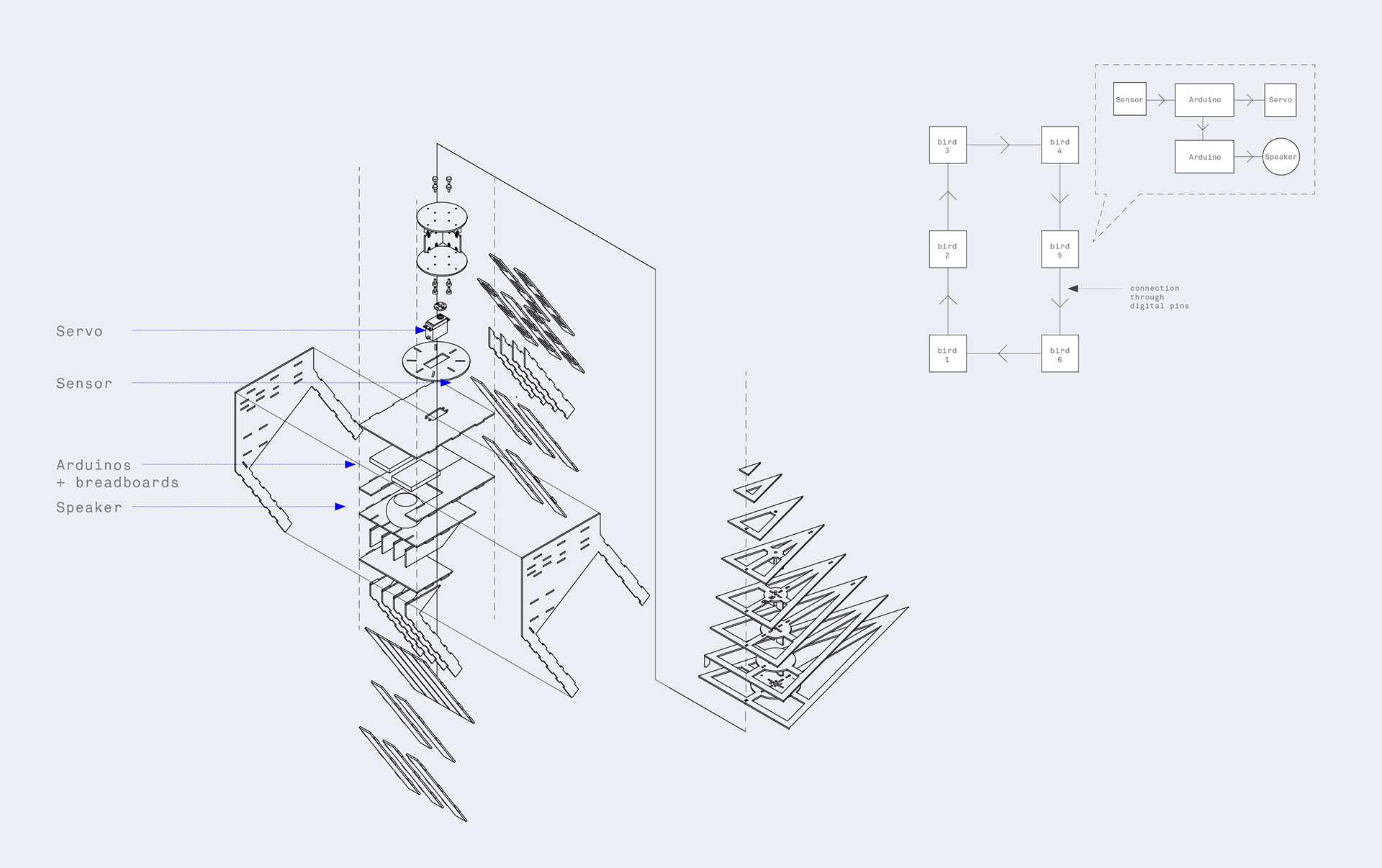
What? Chirp is the result of a one week collaborative workshop realised at the Interactive Architecture Lab. As a team, we investigated the emergence of swarm behaviours through quick prototyping. We created a swarm of 6 robotic birds temporally installed in Hackney Wick, on the River Lea bank.
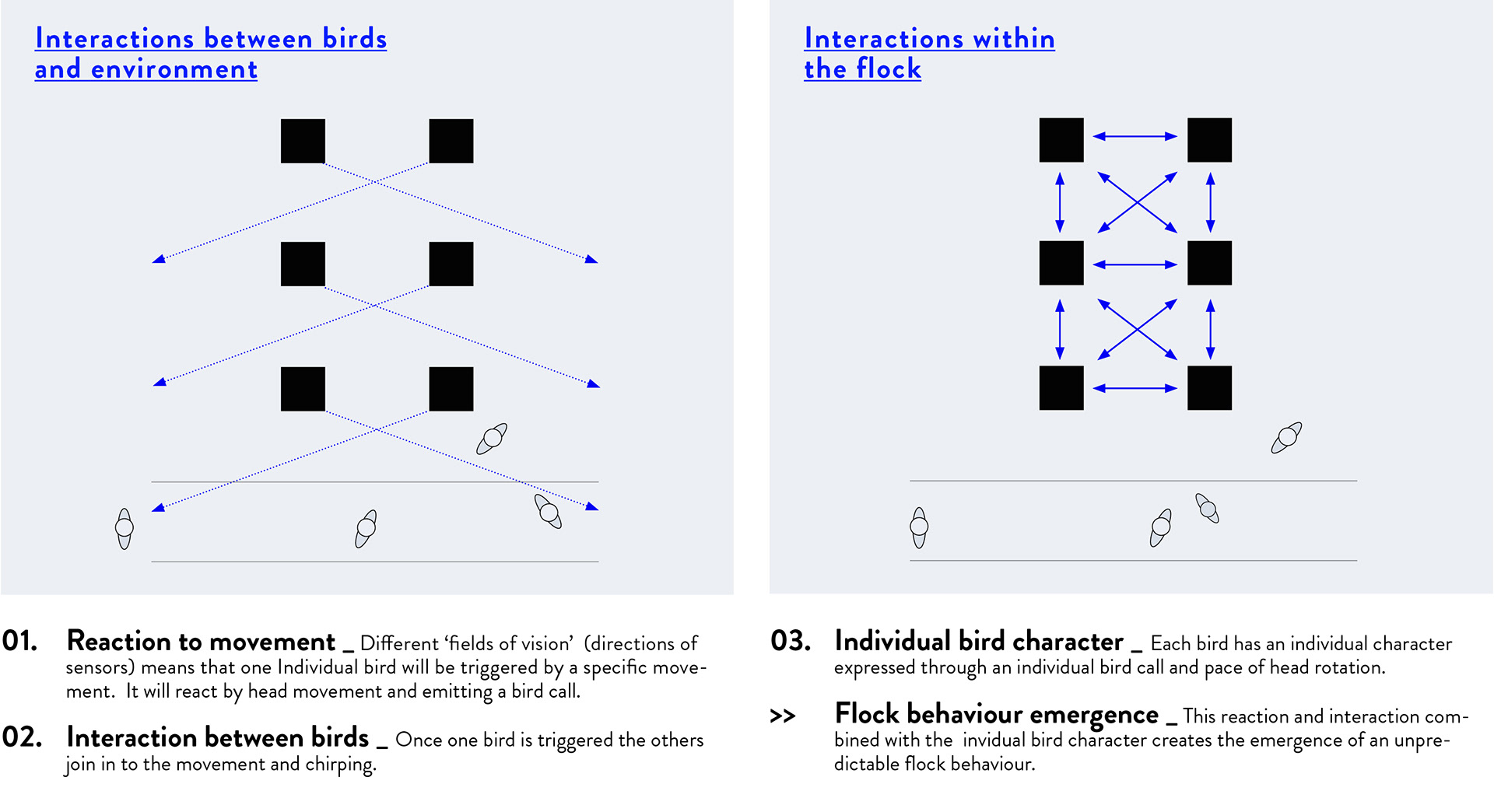
How? The 6 robotic birds react to their environment through motion sensors. When a movement is detected by one of them, its head rotates and it emit sa bird-like sound. Each bird has an individual character expressed through an individual bird call and pace of head rotation. This creates a chain reaction as each bird reacts to the movements of its peers. These interactions combined with each individual bird character triggers the emergence of an unpredictable swarm behaviour.

All images copyrights @ Elyne Legarnisson.